OASIS采用开放开源形式研发的仿真测试平台及其生态, 有望连接科研,监管,产业三方,
促进智驾研发企业的成长和转型。
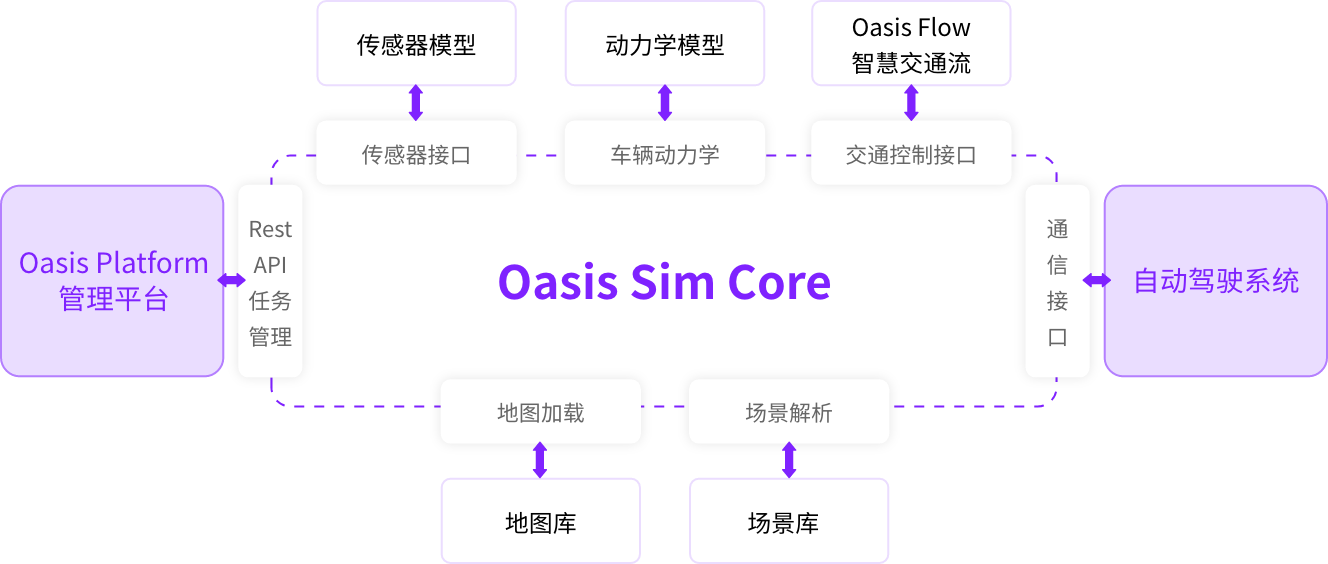
OASIS Sim定位为一个开放的仿真基础平台, 以最小化的组织形式实现仿真关键功能。
OASIS Sim与Carsmos内其他开源项目组成完整智能驾驶研发工具链,
降低研发门槛, 提高研发自由度和可维护性。
OASIS DSL是一套面向动态交通场景描述的形式化领域特定语言,
具备以上形式化语言的优势。OASIS DSL开源项目提供了语法设计,
领域模型及语言在OASIS Sim仿真平台上的实现,
包括基于OASIS DSL的交互式场景编辑器。
技术价值
自主设计的场景语言和编译器, 全球仅有的2个开源场景语言之一。
兼容OpenScenario 1 & 2语义, 支持OpenScenario的仿真生态。融合了形式化的规则描述和测试, 场景描述和测试一体。基于vena场景语言的基于web的场景库IDE和cloud native方式部署的场景仿真环境, 支持场景构建到场景测试的闭环。Apache 2.0 license的场景语言Spec, 兼容OpenScenario 2.0标准,允许第三方的语言实现。
业务价值
基于开源场景语言实现, 完整的开源仿真环境对接, 开源场景库设计IDE和部署工具, 满足了研究、监管、产业共同使用和进化场景语言特性。
生态价值
通过国标的场景描述语言和场景库,形成自主可控的机器人和自动驾驶仿真测试生态。
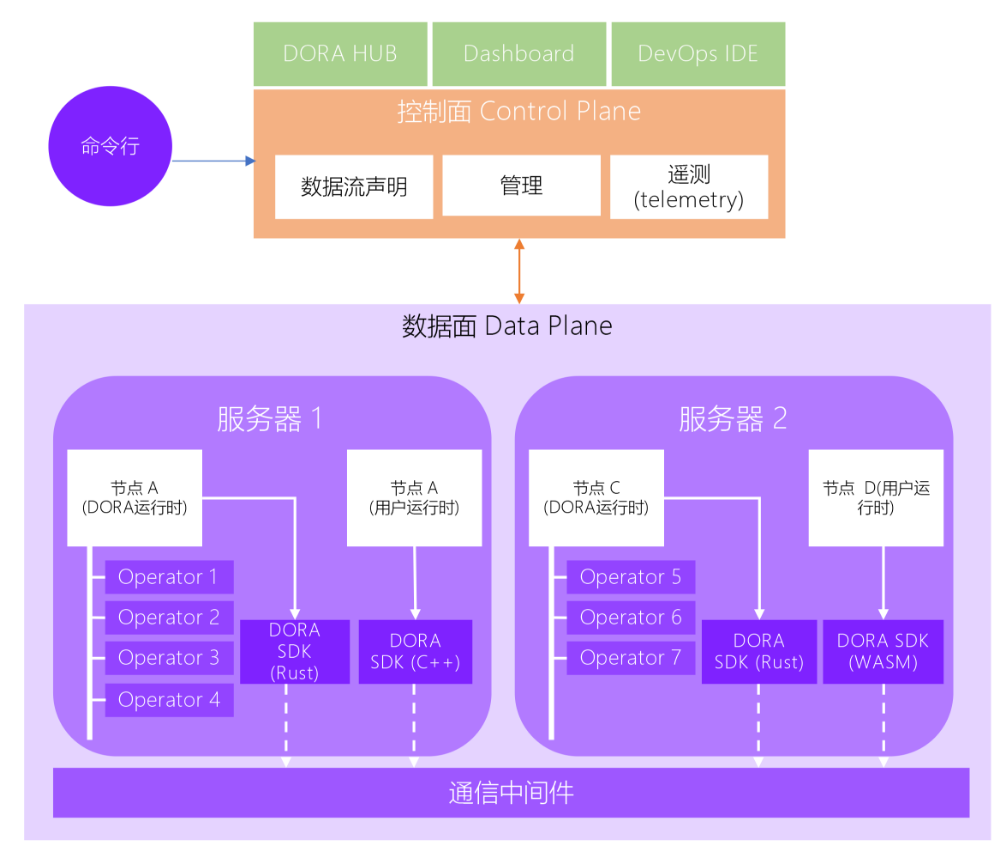
 DORA - 面向数据流的机器人架构
DORA - 面向数据流的机器人架构